



کاهنده سرعت ربات زیرچشمی نگاه کردن آر وی یک دستگاه کاهنده سرعت با دقت بالا است که مواد کامپوزیت زیرچشمی نگاه کردن (پلی اتر اتر کتون) را به ساختار انتقال سرعت آر وی (چرخشی وکتور) اعمال میکند و استحکام بالای کاهندههای سرعت آر وی را با مزیت سبکی مواد زیرچشمی نگاه کردن ادغام میکند. در ادامه مقدمهای از جنبههای نوآوری ساختاری، خواص مواد، شاخصهای عملکرد و سناریوهای کاربردی ارائه شده است:
نوآوری ساختاری
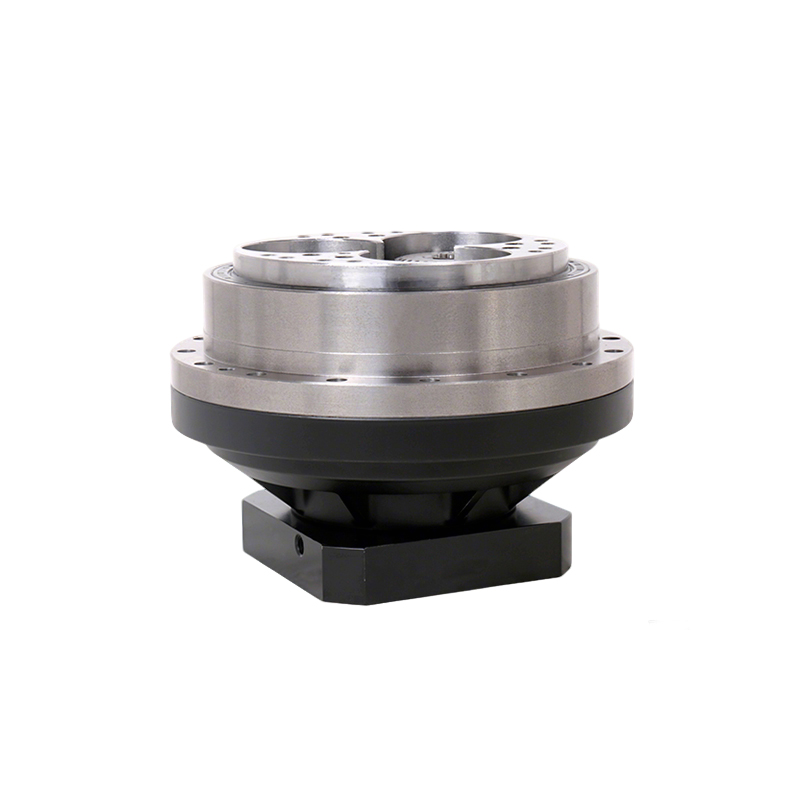
این سیستم از یک ساختار کاهنده دو مرحلهای استفاده میکند: مرحله اول کاهنده دنده سیارهای (دنده خورشیدی + ۳ دنده سیارهای) و مرحله دوم کاهنده فرفرهای سیکلوئیدی (۲ چرخ سیکلوئیدی با اختلاف فاز ۱۸۰ درجه) است. در اجزای اصلی سیستم انتقال قدرت، چرخهای سیکلوئیدی از قالبگیری تزریقی زیرچشمی نگاه کردن تقویتشده با فیبر کربن ۳۰٪ ساخته شدهاند، پینهای دندانه پین از سازههای کامپوزیتی زیرچشمی نگاه کردن-فلز (لایه مقاوم در برابر سایش پیک در قسمت بیرونی + شفت هسته فولادی) هستند و محفظه یاتاقان شفت خارج از مرکز، بوشهای خود روانکننده پیک را در خود جای داده است که امکان کارکرد طولانی مدت بدون روغن را فراهم میکند. ساختار کلی از طریق توپولوژی المان محدود بهینه شده است و تعداد قطعات را در مقایسه با کاهندههای آر وی فولادی سنتی ۲۵٪ کاهش میدهد.

دوم. خواص مواد
مزیت نسبت استحکام به وزن: استحکام کششی چرخ سیکلوئیدی پیک به 180 مگاپاسکال میرسد، با چگالی تنها 1.45 گرم بر سانتیمتر مکعب، که در مقایسه با چرخهای سیکلوئیدی فولادی، وزن را 55 درصد کاهش میدهد. در عین حال، استحکام خمشی ریشه دندانه از طریق طراحی جهتگیری فیبر کربنی 40 درصد افزایش مییابد.
عملکرد دینامیکی: ضریب میرایی ماده 0.02 (0.001 برای فولاد) است که نویز انتقال را 15-20 دسیبل کاهش داده و فرکانس رزونانس را به بیش از 3000 هرتز افزایش میدهد.
سازگاری با محیط زیست: خواص مکانیکی پایدار را در محدوده دمایی -60 درجه سانتیگراد تا 220 درجه سانتیگراد حفظ میکند، در برابر فرسایش روغن هیدرولیک و روغن دنده مقاوم است و الزامات سطح حفاظت IP67 را برآورده میکند.

سوم. شاخصهای اصلی عملکرد
دقت انتقال: لقی ≤ ۱۵ ثانیه قوسی، دقت موقعیتیابی تکراری ±۵ ثانیه قوسی، نوسان گشتاور شروع بدون بار ≤ ۳٪.
ظرفیت بار: گشتاور خروجی نامی ۸۰-۳۰۰ نیوتن متر (مدلهای مربوطه آر وی-40 تا آر وی-110)، ضریب اضافه بار کوتاه مدت ۲.۵ برابر.
راندمان و طول عمر: راندمان انتقال ۹۴٪-۹۶٪ (با ورودی ۲۰۰۰ دور در دقیقه)، میانگین زمان بین خرابیها (میانگین میانگین مدت زمان بین دو شکست (MTBF)) ۲۰،۰۰۰ ساعت (تحت شرایط نامی).
چهارم. سناریوهای کاربردی معمول
رباتهای انساننما: قطعات با بار زیاد مانند مفاصل چرخش کمر و مفاصل زانو، مانند واحد محرک مفصل ران تسلا اوپتیموس (نیاز به کاهندههای کلاس ۲۰۰ نیوتن متر).
رباتهای صنعتی: محورهای J2/J3 بازوهای مکانیکی شش محوره، جایگزین کاهندههای هارمونیک سنتی برای دستیابی به استحکام بالاتر.
تجهیزات پیشرفته: رباتهای جابجایی ویفر نیمههادی، رباتهای جراحی که باید همزمان الزامات سبکی و دقت موقعیتیابی در سطح میکرون را برآورده کنند.









