



زیرچشمی نگاه کردنکاهندههای هارمونیکدستگاههای کاهنده دقیق و نوآورانهای هستند که مواد کامپوزیتی پلیاتراترکتون (زیرچشمی نگاه کردن) را به ساختار محرک هارمونیک اعمال میکنند و ویژگیهای نسبت کاهندگی بالای کاهندههای هارمونیک سنتی را با مزایای سبکی مواد پیک ترکیب میکنند. در ادامه مقدمهای مفصل از چهار بُعد ارائه شده است: ویژگیهای ساختاری، نوآوری مواد، پارامترهای عملکرد و زمینههای کاربرد:

۱. ویژگیهای ساختاری
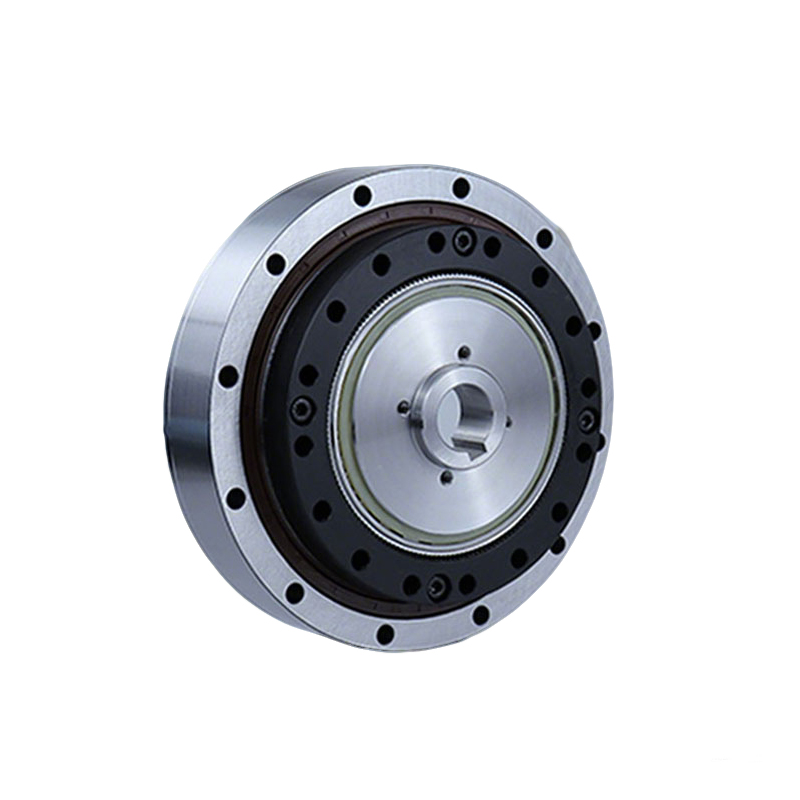
زیرچشمی نگاه کردنکاهندههای هارمونیک ساختار محرک هارمونیک کلاسیک مولد موج - چرخدنده انعطافپذیر - چرخدنده صلب را اتخاذ میکنند. نوآوری اصلی کاهندههای هارمونیک در استفاده از زیرچشمی نگاه کردن تقویتشده با الیاف شیشه بلند ۵۰٪ برای قالبگیری تزریقی یکپارچه چرخدنده انعطافپذیر نهفته است و حلقه چرخدنده داخلی چرخدنده صلب، یک ساختار درج فلزی زیرچشمی نگاه کردن (پایه فولادی + سطح دندانه پیک) است. حلقه بیرونی یاتاقان مولد موج با یک قفس خود روانکننده پیک یکپارچه شده است و وابستگی به گریس را در کاهندههای هارمونیک سنتی از بین میبرد. ساختار کلی از طریق بهینهسازی توپولوژی طراحی شده است، به طوری که تلرانس ضخامت دیواره چرخدنده انعطافپذیر در محدوده ±۰.۰۱ میلیمتر کنترل میشود تا تغییر شکل الاستیک ثابت در حین درگیری تضمین شود.
دوم. نوآوری در مواد
دستیابی به موفقیت در سبکی: چگالی چرخدنده انعطافپذیر زیرچشمی نگاه کردن تنها 1.5 گرم بر سانتیمتر مکعب است که در مقایسه با چرخدنده انعطافپذیر فولادی، وزن را 60٪ کاهش میدهد و ممان اینرسی را 45٪ کاهش میدهد و به طور قابل توجهی سرعت پاسخ دینامیکی مفاصل ربات را افزایش میدهد.
مقاومت در برابر خستگی: از طریق بهینهسازی جهتگیری الیاف، عمر خستگی خمشی چرخدنده انعطافپذیر پیک به 10⁸ سیکل (تحت بار نامی) میرسد که به 85٪ از سطح فولاد نزدیک میشود.
بهینهسازی اصطکاک: ضریب اصطکاک سطح دندانه پیک به کمی 0.05 (در شرایط اصطکاک خشک) است و هنگامی که با پوشش PTFE روی سطح دندانه سفت و سخت چرخدنده ترکیب میشود، امکان عملکرد بیصدا و بدون روغن (سروصدا) را فراهم میکند.≤۵۵ دسیبل).
سوم. پارامترهای عملکرد اصلی
محدوده نسبت کاهش: ۵۰:۱ تا ۳۲۰:۱ (انتقال تک مرحلهای)، پشتیبانی از اتصال سری چند مرحلهای برای دستیابی به نسبت کاهش فوقالعاده بالای ۱۰۰۰۰:۱
گشتاور نامی: ۳ تا ۵۰ نیوتن·متر (مدلهای مربوطه اچ ایکس-14 تا اچ ایکس-50)، گشتاور اوج میتواند به دو برابر مقدار نامی برسد
شاخصهای دقت: واکنش شدید≤۱ دقیقه، خطای انتقال≤۳۰ ثانیه قوسی، سختی پیچشی≥۲۰ ن·متر/راد
سازگاری با محیط زیست: دمای عملیاتی -40℃تا ۱۸۰℃سازگار با محیطهای خلاء (میتواند در دمای 10 درجه سانتیگراد به طور پایدار کار کند)⁻⁶خب)
چهارم. زمینههای کاربردی معمول
رباتهای مشارکتی: مفاصل مچ دست رباتهای انتهایی، مانند محور ششم ربات UR5e، که به گرفتن اجسام با وزن سبک و دقت بالا کمک میکند.
تجهیزات پزشکی: مفاصل حرکتی کوچک بازوهای ربات جراحی (مانند دا وینچی شی)، که نیاز به رعایت محیطهای ضدعفونیشده و تداخل الکترومغناطیسی کم دارند.
هوافضا: مکانیسمهای کنترل وضعیت ماهواره، بازوهای مکانیکی پهپاد، استفاده از قابلیت سازگاری با خلأ و ویژگیهای سبک وزن برای کاهش هزینههای پرتاب.
کاهندههای هارمونیک زیرچشمی نگاه کردن: استفاده از زیرچشمی نگاه کردن تقویتشده با فیبر کربن (سی اف/زیرچشمی نگاه کردن) برای ساخت کاهندههای هارمونیک میتواند تنش تغییر شکل را تنها به ۱/۷ فولاد کاهش دهد، ویژگیهای میرایی را بهبود بخشد و خطر رزونانس را کاهش دهد. تعداد دندانههای تماس بین چرخدنده انعطافپذیر و دندانههای چرخدنده صلب را میتوان تا ۴۷٪ افزایش داد که به طور قابل توجهی عمر خستگی را افزایش میدهد، به طوری که تعداد چرخه از ۲۹۰۰۰ بار برای چرخدندههای انعطافپذیر فلزی به ۵۶۴۰۰۰ بار افزایش مییابد.
کاهندههای هارمونیک زیرچشمی نگاه کردن: سی اف/زیرچشمی نگاه کردن عملکرد برتر ارائه میدهد
علاوه بر مزایایی مانند استحکام ویژه و مقاومت در برابر سایش، در مقایسه با سیلندر کوتاه پایه فلزیکاهندههای هارمونیک پیککاهندههای هارمونیک زیرچشمی نگاه کردن ساخته شده از سی اف/زیرچشمی نگاه کردن دارای ویژگیهای زیر هستند:۱. (۱)تنش تغییر شکل کمتر،②ویژگیهای میرایی بهتر، که به طور مؤثر احتمال رزونانس را کاهش میدهد،۳. (۳)افزایش تعداد دندانههای تماس و ناحیه درگیری بین دنده انعطافپذیر و دندانههای دنده صلب، که باعث افزایش تحمل بار و مقاومت در برابر ضربه کاهنده هارمونیک پیک میشود.④عمر خستگی برتر و غیره
(1) در مقایسه با کاهندههای هارمونیک سیلندر کوتاه پایه فلزی، تحت بار یکسان، تنش تغییر شکل مواد کامپوزیتی پایه زیرچشمی نگاه کردن تنها 1/7 تنش تغییر شکل فولاد است. بنابراین، در ابعاد محوری کوچکتر، میتوان ماژول دنده بزرگتر و ضریب تغییر شکل شعاعی را برای ساختار طراحی انتخاب کرد که آزادی طراحی بیشتری را فراهم میکند.
(2) فرکانسهای طبیعی کل کاهنده هارمونیک مواد کامپوزیتی مبتنی بر پیک، 40 تا 45 درصد بیشتر از کاهندههای هارمونیک فلزی است، که نشان میدهد کاهندههای هارمونیک مواد کامپوزیتی زیرچشمی نگاه کردن مبتنی بر زیرچشمی نگاه کردن ویژگیهای میرایی بهتری دارند و میتوانند به طور مؤثر احتمال رزونانس را کاهش دهند.
(3) تحت شرایط عملیاتی نامی بار 20 نیوتن متر و سرعت 2000 رادیان بر دقیقه، تعداد دندانههای درگیر در کاهنده هارمونیک مواد کامپوزیتی زیرچشمی نگاه کردن افزایش مییابد و به 52 جفت میرسد که نسبت به فلز 47٪ افزایش نشان میدهد. افزایش تعداد دندانههای تماس و سطح درگیری بین دنده انعطافپذیر و دنده صلب، سطح درگیری جفت دنده را افزایش میدهد و فشار تماس روی سطوح بیشتری از دندانههای دنده توزیع میشود و تحمل بار و مقاومت در برابر ضربه کاهنده هارمونیک پیک را افزایش میدهد.
(4) تحت ساختار یکسان، کاهندههای هارمونیک سیلندر کوتاه سی اف/زیرچشمی نگاه کردن عمر خستگی بهتری دارند. کاهندههای هارمونیک فلزی سنتی تنش تغییر شکل بیش از حدی دارند و دندانههای چرخدنده انعطافپذیر وقتی تعداد چرخه به 29000 بار میرسد، دچار شکست استاتیک میشوند. انتظار میرود چرخدنده انعطافپذیر ساخته شده از مواد کامپوزیتی زیرچشمی نگاه کردن تعداد چرخه 564000 بار و عمر خستگی 939.5 ساعت داشته باشد.











