


مقدمهای بر مواد زیرچشمی نگاه کردنسنسورهای ربات
زیرچشمی نگاه کردن (پلیاتر اتر کتون) یک پلاستیک مهندسی ویژه با کارایی بالا است که دارای خواصی مانند مقاومت در برابر دمای بالا (دمای کارکرد طولانی مدت حدود ۲۴۰ درجه سانتیگراد)، مقاومت در برابر خوردگی شیمیایی، استحکام بالا، وزن سبک، ضریب اصطکاک کم و عایق الکتریکی عالی است. این مزایا، آن را به مادهای ایدهآل برای اجزای کلیدی حسگرهای ربات تبدیل کرده و کاستیهای حسگرهای فلزی یا پلاستیکی معمولی را از نظر دقت، پایداری و سازگاری با محیط زیست برطرف میکند.
I. انواع و ویژگیهای برنامههای کاربردی اصلی
مواد زیرچشمی نگاه کردن عمدتاً با ساخت اجزای ساختاری اصلی یا زیرلایههای عملکردی حسگرها عمل میکنند. انواع کاربردهای رایج به شرح زیر است:
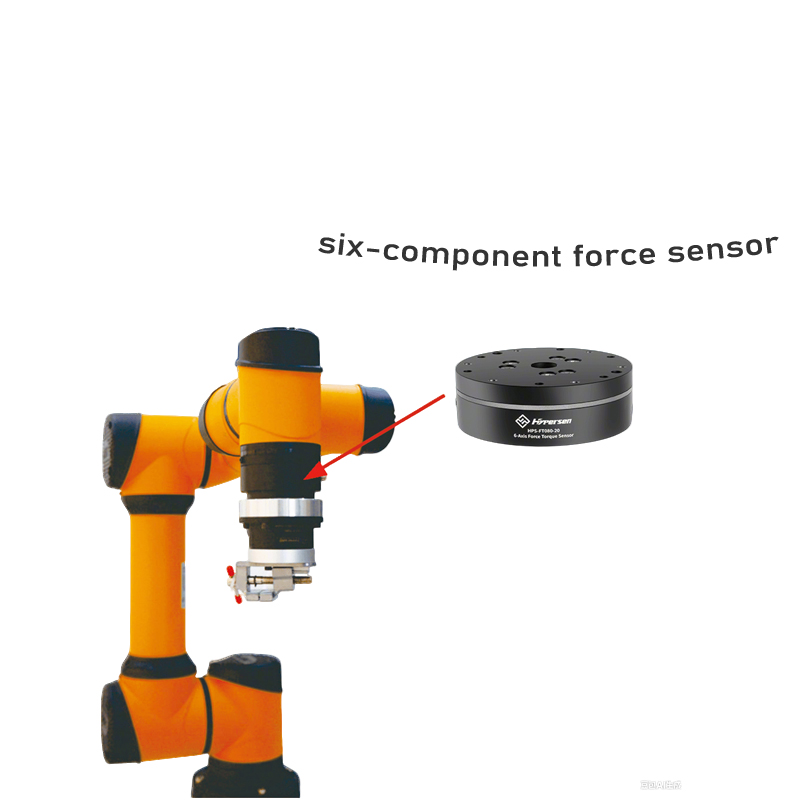
۱. حسگرهای نیرو/گشتاور شش بعدی
بخش کاربردی: بدنهی الاستیک (جزء اصلی برای درک سیگنال نیرو) حسگر.
ارزش اصلی: بدنههای الاستیک سنتی عمدتاً از آلیاژ آلومینیوم ساخته میشوند، در حالی که زیرچشمی نگاه کردن نسبت مدول الاستیک به چگالی بهتری دارد - که استحکام ساختاری را تضمین میکند و در عین حال جرم بدنه الاستیک را به طور قابل توجهی کاهش میدهد، تداخل اینرسی را در حین حرکت ربات به حداقل میرساند و دقت اندازهگیری نیرو (تا ±0.1% اف اس) و سرعت پاسخ دینامیکی (زمان پاسخ <1ms) را بهبود میبخشد.
سناریوهای معمول: مونتاژ ربات صنعتی (مانند کنترل دقیق نیروی سفت کردن پیچ)، تعامل مشارکتی ربات انسان و ماشین (مانند درک نیروی برخورد)، بازخورد نیروی جراحی ربات پزشکی (مانند نظارت بر نیروی سایش سطح استخوان در رباتهای ارتوپدی).

۲. حسگرهای لمسی/فشاری
بخش کاربردی: زیرلایه انعطافپذیر یا حامل الکترود حسگر.
ارزش اصلی: زیرچشمی نگاه کردن انعطافپذیری و مقاومت در برابر خستگی خاصی دارد که امکان پردازش آن را به اشکال نازک یا نامنظم فراهم میکند و برای سناریوهای تماسی منحنی یا انعطافپذیر مانند انگشتان ربات و گیرهها مناسب است؛ در عین حال، عایق الکتریکی آن میتواند از تداخل سیگنال جلوگیری کند و پایداری دادههای لمسی (مانند فشار، تشخیص بافت) یا کرنش (مانند تغییر شکل مفصل) را تضمین کند.
سناریوهای معمول: درک فشار در رباتهای خدماتی هنگام گرفتن اشیاء شکننده (مانند شیشه، میوهها)، نظارت بر کرنش برای تناسب در مونتاژ انعطافپذیر رباتهای صنعتی.
۳. حسگرهای تخصصی برای محیطهای خورنده
بخش کاربردی: محفظه، غلاف محافظ پراب یا اجزای تماسی سنسور.
ارزش اصلی: زیرچشمی نگاه کردن مقاومت بسیار بالایی در برابر اسیدها، قلیاها، حلالهای آلی و بخار با دمای بالا (مانند تمیز کردن سی آی پی در صنایع غذایی) دارد که بسیار برتر از فولاد ضد زنگ یا پلاستیکهای معمولی است و اجزای داخلی سنسور را از خوردگی محافظت کرده و عمر مفید آن را افزایش میدهد.
سناریوهای معمول: حسگرهای سطح/غلظت مایع در رباتهای غذایی/پزشکی (مانند نظارت بر سطح مایع در مخازن سس)، حسگرهای پارامترهای محیطی در رباتهای شیمیایی (مانند محافظت از پروبهای تشخیص گازهای خورنده).
دوم. مزایای اصلی نسبت به مواد سنتی

سوم. زمینههای کاربردی معمول
رباتهای صنعتی: کنترل نیروی مونتاژ، بازخورد نیروی سنگزنی، نظارت بر فشار چنگش؛
رباتهای پزشکی: درک نیرو از ابزارهای جراحی (مانند بازخورد نیرو در عملهای لاپاروسکوپی)، نظارت بر کشش مفاصل رباتهای توانبخشی؛
رباتهای ویژه: حسگرهای محیطی مقاوم در برابر خوردگی در زمینههای غذایی/شیمیایی، حسگرهای دما/نیرو در شرایط دمای بالا (مانند جوشکاری خودرو).









